

Building an underwater robot for Antarctic marine science
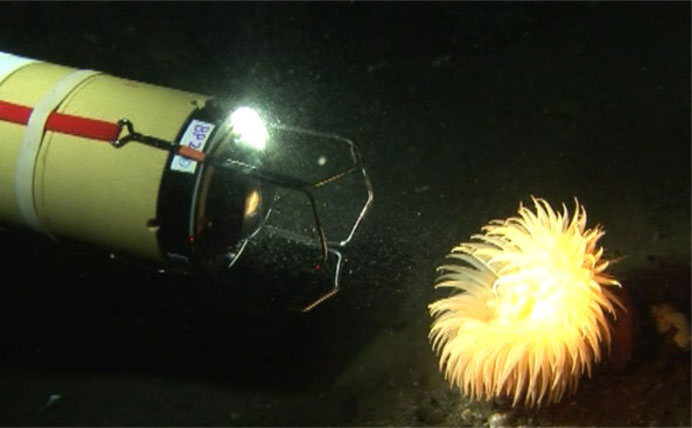
SCINI examines an anemone under the ice in Antarctica.
In the darkness under the ice, SCINI’s 22 forward pointing and 12 downward pointing LEDs provide enough light to capture high resolution images.
All Antarctic marine scientists struggle with one common challenge: how to get through the frozen surface of the ocean. Geological, chemical, physical, and biological oceanographers are all “in the same boat.” Some wait until summer months when the sea ice melts, allowing traditional oceanographic techniques and tools to be used. But Stacy Kim can’t wait. She wants to study ecological processes in the remote areas under permanent ice shelves that have been in place for thousands of years, and annual cycles in areas that are covered by pack and fast ice for 10 or 11 months of the year. To overcome the ice barrier, a team of engineers from Moss Landing Marine Laboratories designed and built SCINI, the Submersible Capable of under Ice Navigation and Imaging. SCINI is a Remotely Operated Vehicle (ROV), tethered to the surface for real time imagery and remote control between the pilot on the surface and the vehicle hundreds of meters beneath

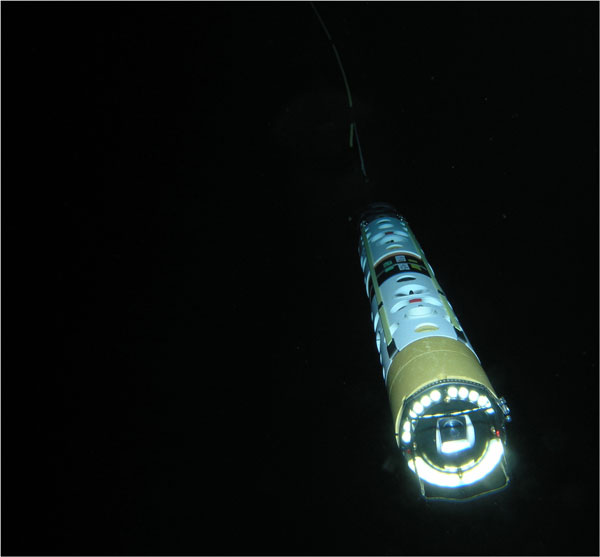
Launching SCINI through a 20 cm diameter hole in 7 m thick ice.
Permanent ice shelves are disappearing in Antarctica, but scientists don’t know how the benthic, or seafloor, ecosystems underneath them will be affected. Since 1992, seven Antarctic ice shelves have collapsed catastrophically. Disintegrating ice shelves allow access to the underlying seafloor, as the overlying permanent ice that was several hundreds of meters thick is replaced by sea ice that is only a few meters thick. The ecological change that follows is rapid, but since what was there before the collapse is unknown, there is no baseline to assess the shift. SCINI is a powerful tool in the race to describe normal benthic communities under ice shelves before they vanish.
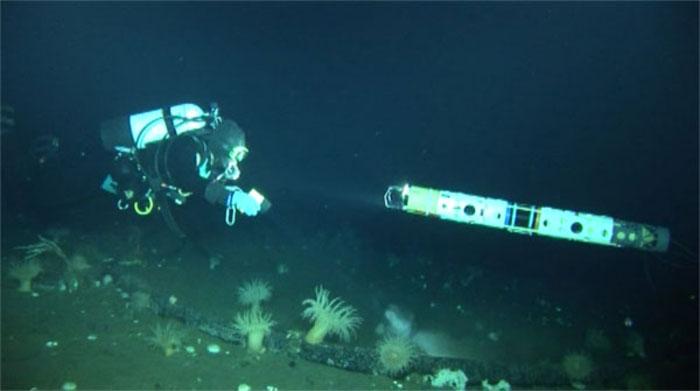
Stacy dives with SCINI on a test mission.







